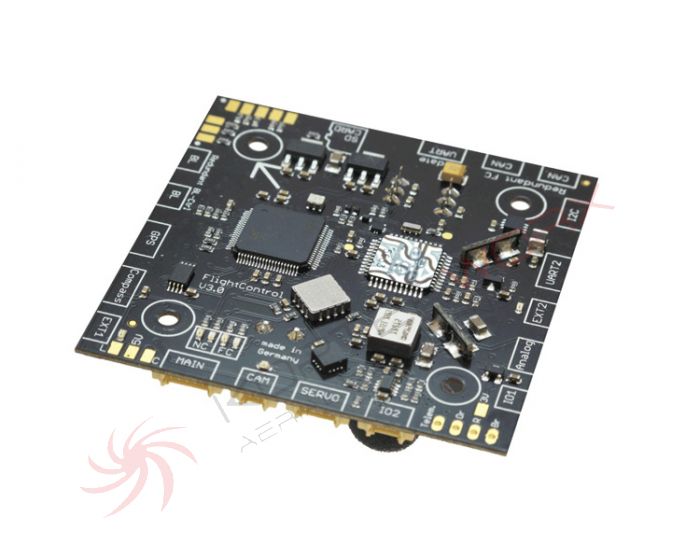
Flight-Ctrl V3.0
3 on stock
SKU
fc30
Special Price €305.00 €250.00 Regular Price €499.96
.
FlightControl with integrated NaviControl: This is the new autopilot for MikroKopter - precise piloting with 32-bit navigation control combined in one module.
Proven technology has been integrated into a circuit board, equipped with new features and designed to be extensible for future requirements.
The Flight-Ctrl V3.0 has improved camera integration : In conjunction with our camera control (CAMCtrl) functions such as zoom or recording can be controlled. At the same time you get the MikroKopter telemetry feedback about the status of the camera.
With an optional Hot-shoe adapter the exact GPS triggering position will be stored in a separate data file on the integrated SD card.
To use a redundant system (ie 2 autopilot to increase security), a completely new communication interface (CAN bus) has been integrated. The user receives system information from both systems via telemetry.
The implementation of the CAN bus system opens up new possibilities for the future. Additional inputs and outputs, as well as a free UART interface are also integrated for future use. It will be activated via a software update.
A Redundant data bus (I2C & UART) for controlling the brushless motor is already provided by hardware.
Source code, libraries, protocols, and a special 'compile' license are available for developers. For example, for integration or connection of additional sensors or hardware (Raspberry Pi, RTK applications, collision detection / avoidance, etc.)
Waypoint-planning and telemetry output is possible by a PC program, as well as the Android app MK tablet tool (MK-TT). For these function, a wireless data interface can be connected (Like RangeExternder etc) Telemetry and voice output via a HoTT or Jeti Tranmitter keeps you informed about the actual state of your MikroKopter (Altitude, distance, voltage, Speed, etc)
Of course, standard functions such as Position Hold, Coming Home and FailSafe functions are supported.
The electronics is equipped with a wide range of high quality sensors (gyroscopes, accelerometers, barometric pressure sensor). The autopilot can be used up to an altitude of 5000m Sealevel .
The built-in Flight recorder saves all important operating data onto the built-in micro-SD card. This data can be analyzed by a special tool. The flight path can be shown on Google Earth.
The servo outputs (for example, to connect a camera gimbal) are located on a small adapter board (TinyServo adapter). This can be mounted on an easily accessible position. An optional servo adapter with its own voltage regulator is available, for example to control more powerful servos.
The new GPS module MKGPS V3.5 required (or an older MKGPS with external compass).
A MKUSB V3> is required for setup or firmware update.
Proven technology has been integrated into a circuit board, equipped with new features and designed to be extensible for future requirements.
The Flight-Ctrl V3.0 has improved camera integration : In conjunction with our camera control (CAMCtrl) functions such as zoom or recording can be controlled. At the same time you get the MikroKopter telemetry feedback about the status of the camera.
With an optional Hot-shoe adapter the exact GPS triggering position will be stored in a separate data file on the integrated SD card.
To use a redundant system (ie 2 autopilot to increase security), a completely new communication interface (CAN bus) has been integrated. The user receives system information from both systems via telemetry.
The implementation of the CAN bus system opens up new possibilities for the future. Additional inputs and outputs, as well as a free UART interface are also integrated for future use. It will be activated via a software update.
A Redundant data bus (I2C & UART) for controlling the brushless motor is already provided by hardware.
Source code, libraries, protocols, and a special 'compile' license are available for developers. For example, for integration or connection of additional sensors or hardware (Raspberry Pi, RTK applications, collision detection / avoidance, etc.)
Waypoint-planning and telemetry output is possible by a PC program, as well as the Android app MK tablet tool (MK-TT). For these function, a wireless data interface can be connected (Like RangeExternder etc) Telemetry and voice output via a HoTT or Jeti Tranmitter keeps you informed about the actual state of your MikroKopter (Altitude, distance, voltage, Speed, etc)
Of course, standard functions such as Position Hold, Coming Home and FailSafe functions are supported.
The electronics is equipped with a wide range of high quality sensors (gyroscopes, accelerometers, barometric pressure sensor). The autopilot can be used up to an altitude of 5000m Sealevel .
The built-in Flight recorder saves all important operating data onto the built-in micro-SD card. This data can be analyzed by a special tool. The flight path can be shown on Google Earth.
The servo outputs (for example, to connect a camera gimbal) are located on a small adapter board (TinyServo adapter). This can be mounted on an easily accessible position. An optional servo adapter with its own voltage regulator is available, for example to control more powerful servos.
the following navigation features are possible:
- Simulation of flights: the complete flight can be simulated incl. waypoints, manual flight by tranmitter, automatic camera releases etc.
- automatic PositionHold
- automatic ComingHome)
- waypoint flights incl. GPS-Positions altitudes within 250 from starting point (can be extended by a seperate license)
- automatic camera releases in certain distances
- failsafe-position for the case of RC-tranmission lost
- Point-Of-Interest: The camera points automatically to the POI
- automatic flight of pattern and areas
- automatic creation of panoramas
- writing a logfile on the SD-card with all important informations
- writing a camera-logfile for the camera releases -> for exaple with external trigger input (hot shoe contact)
Connectivity
- receiver with telemetry -> Display of all important data at HoTT or Jeti transmitter systems
- external servo outputs to control camera gimbals
- Connection of a trigger input (hot shoe contact) -> the camera release positions are logged in a seperate logfile
- Serial interface for connection to a wireless interface -> example for path-planning and configuration
- free serial port, for example, to connect to RTK GPS systems (by later software updates)
- three seperate I2C busses -> BL-controller, Compass, camera control etc.
- three analog inputs -> the values are recorded in the logfile
- trigger output for triggering a camera
- Connection for CAMCtrl -> controlling of SONY cameras incl. Zoom and feedback to the transmitter (REC, counters for photos, etc.)
- Switching output for led lights
- Redundant, serial data bus to the BL-V3 controllers
- CAN bus: for example, for connecting a redundant flight control or other periperals
- SD card slot: for the flight recorder, camera log files, configuration files, etc.
The new GPS module MKGPS V3.5 required (or an older MKGPS with external compass).
A MKUSB V3> is required for setup or firmware update.
delivery
- 1 FlightControl V3.0 (with integrated NaviControl), programmed and tested
- 1 TinyServo board with two (max:4) Servo outputs
- 1 Buzzer
- cables
Technical Data
- Dimension: ca. 67mm x 67mm
- Weight: ca. 32g
Notes
- only compatible since firmware version 2.14
- FlightCtrl should be mounted onto vibrations dampers. Please use the vibration dampers M3x15 from our shop (see below)
- MKGPS & MKUSB not inclusive
- GPS waypoint radius is max. 250m around the start point. ComingHome or PositionHold possible without range limit
- With a commercial license an expanded GPS waypoint radius and up to 100 waypoints are possible
- Please refer to the terms of use of the software
- A Installation manual exists only in digital format. Manual
- The electronic components have to be protected against moisture and humidity. When operating under such special conditions
- a corresponding varnish has resist to be used.
Links
Write Your Own Review