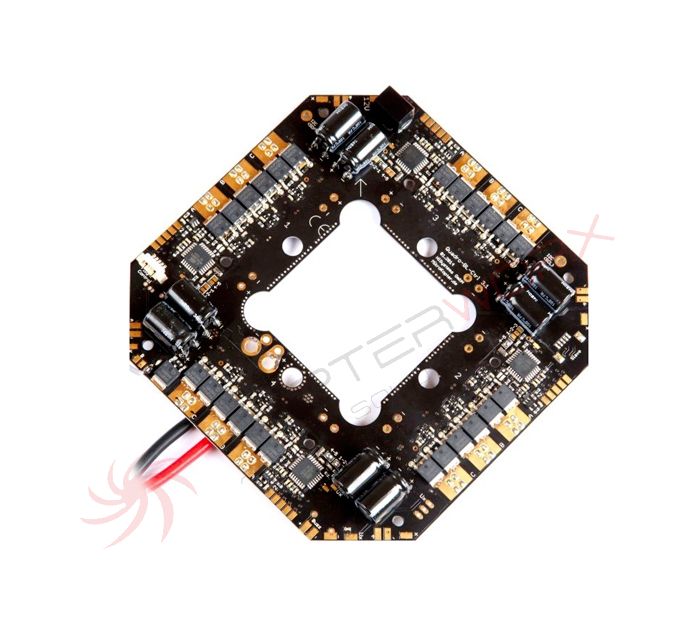
Quadro 2XL - Combi
2 on stock
SKU
quadro2xlc
Special Price €329.40 €270.00 Regular Price €479.00
.
4 ESCs on two boards! Extremely fast brushless controllers version V3 for our MikroKopter
IMPORTANT: Use FlightCtrl Firmware V2.02 (or greater), otherwise read the instructions in the wiki !
The board is tested and programmed (including bootloader)
Note: The BL-Ctrl 3.0 controller is specifically designed and optimized for our motors. For maximum stability of the MikroKopter setpoints are set almost instantaneously on the motor. If other motors (especially larger power classes) are used with this controller, this fast change of setpoints can easily lead to very high peak currents, which bring the BL-Ctrl control to the limit or an overload. This is no fault of BL-Ctrl3.0 controller, but a systemic property.
power
IMPORTANT: Use FlightCtrl Firmware V2.02 (or greater), otherwise read the instructions in the wiki !
The board is tested and programmed (including bootloader)
Note: The BL-Ctrl 3.0 controller is specifically designed and optimized for our motors. For maximum stability of the MikroKopter setpoints are set almost instantaneously on the motor. If other motors (especially larger power classes) are used with this controller, this fast change of setpoints can easily lead to very high peak currents, which bring the BL-Ctrl control to the limit or an overload. This is no fault of BL-Ctrl3.0 controller, but a systemic property.
power
- voltage : 10 to 30V -> 3 -7S Lipo
- 6 -layer PCB for optimal heat dissipation . 70u copper layers make the entire circuit board to the heat sink .
- current: up to 60A (per BL-Unit) and 120A (all together) with appropriate cooling
- current limiting and temperature limiting
- Active freewheeling -> less power loss
- rapid acceleration and braking of the propeller. Active and seamless braking gives the speed precisely and quickly on the new setpoint .
- return energy to the lipo when braking. Seamless transition from acceleration to braking
- significantly faster control with speed control
- Video
- Integrated 12V voltage regulator for external LED-Supply
- Switchable LED output -> LEDs can flash in case of undervoltage
- Adjustable motor timing in several steps of 13-28° - compatible with the most common BL motors
- Adjustable switching frequency ( 10kHz - 20kHz )
- PPM to 500 Hz with simultaneous I2C - bus operation for telemetry and data logging
- Integrated 12V stabilization for LED lighting and other 12V appliances
- Switchable outputs for lighting -> ZB The blinking lights at low voltage
- Software adjustable direction of rotation
- Adjustable current and temperature limits
- Adjustable start-PWM
- Silent Start: test tone at startup can be disabled
- various interfaces for setpoint input ( I2C, PPM ( 500Hz ) , serial)
- Integrated current measurement measurement of the actual current and the used capacity on the Mikrokopter control
- voltage and temperature measurement with data transmission to the ground station and data logging
- 11-bit resolution (2048 steps )
- various feedback to the MikroKopter-FlightCtrl ( blocked motor , power limiting , etc. )
- extented configuration options (eg current limit , temperature limit , ...)
- two LEDs (OK and Error )
- Adressable by loder-jumpers (address 1-8)
- I2C bus access possible in PPM mode - for data logging and telemetry in PPM mode
- status messages are transmitted to the FC ( engine blocks , Current, Self-test error ...)
- current measurement up to 75A per controller
- Convenient configuration of the BL controller via FC
- hole: 3mm
- Dimensions (W x H ):
- weight: ca. 109g
- 2 SMD preassembled, programmed and tested boards already mounted and soldered
- Lipo Power cable (open ends)
- 1-line cable for LED output control
Write Your Own Review